Dijkstra's Algorithm on Negative-weighted Graphs
As covered in the last lecture, Dijkstra’s algorithm finds the shortest distance from a single source vertex to all other vertices. However, when the graph contains edges with negative weights, Dijkstra’s algorithm might fail to find the shortest distance. Consider the following example.
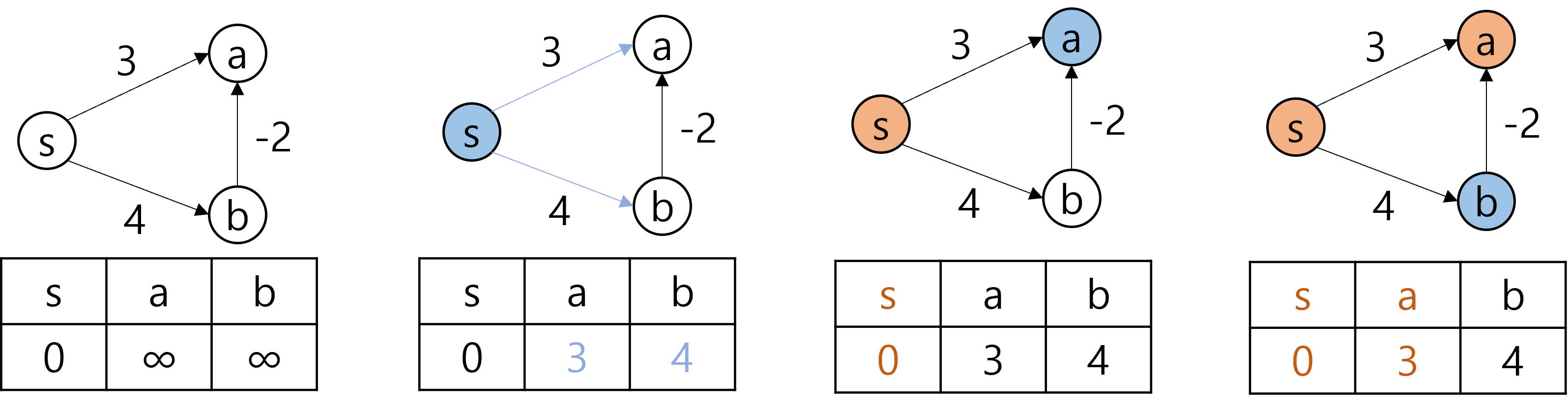
Suppose we start from the vertex $s$. Since the vertices $a$ and $b$ are both reachable from $s$, the distance to the two vertices would be updated to $3$ and $4$ respectively. Then we would visit vertex $a$, which is the closest unvisited vertex. There are no outgoing edges from $a$, so we do not update the distance at all. Lastly we visit vertex $b$. At this point, all other vertices are already marked as visited, so we do not update the distance table. Note that the actual shortest distance from $s$ to $a$ is $2$, which can be obtained by the path $s\rightarrow b \rightarrow a$. However, Dijkstra’s algorithm visits $a$ before it visits $b$ and mark $a$ as visited, which would result in incorrect shortest distance.
Bellman-Ford Algorithm
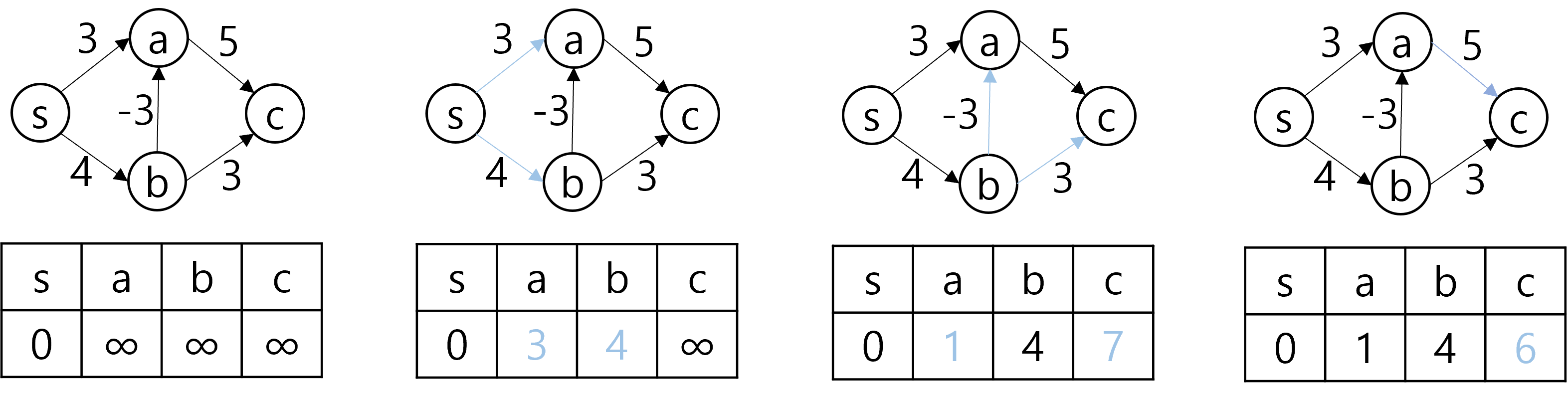
Bellman-Ford algorithm is an algorithm that finds the shortest path from a source vertex to all other vertices, like Dijkstra’s algorithm. The algorithm is slower compared to Dijkstra’s algorithm, but it can handle graphs with negative-weighted edges. At a high level, the algorithm runs as follows:
- Initialize the distance to the source vertex as $0$, and the distance to all other vertices as $\infty$
- For $|V|-1$ times: Check every edge $(u,v)$ and update distance if $d[v] < d[u]+l(u,v)$
Where $d[x]$ denotes the distance from the source vertex to the vertex $x$, and $l(u,v)$ denotes the length of the edge $(u,v)$. Since the algorithm loops for $|V|-1$ times, and each iteration involves checking every edge once, the runtime of the algorithm is $O(|V||E|)$.
Properties of Bellman-Ford Algorithm
As mentioned in the previous section, Bellman-Ford algorithm can handle graphs with negative edges. This is because the algorithm scans over all edges on each iteration with excluding already visited vertices. Due to this behavior, Bellman-Ford Algorithm has a property that after $i$th iteration, the algorithm is guaranteed to discover the shortest distance to every other vertex that can be achieved by using at most $i$ edges. That is, the distances in the table $d$ after $i$th iteration is at least as good as the distance of the actual shortest path with at most $i$ edges.
One natural question we can ask is: Why do we iterate for $|V|-1$ times? How do we know that $|V|-1$ iterations are sufficient to find the shortest path? Suppose there is a path from the source $s$ to another vertex $v$ that uses $|V|$ edges. By pigeonhole principle, there exists a vertex $u$ that appears more than once in the path. In other words, this path definitely contains a cycle. Now suppose the cycle is a positive cycle(that is, the sum of the weights of the edges contained in the cycle is positive). In this case, taking the cycle can only increase the distance to $u$ and all the following vertices. Therefore, there is no point of considering a path containing the cycle when looking for the shortest distance. On the other hand, suppose the cycle is negative cycle. In this case, finding the shortest distance is not possible in the first place, since by repeatedly taking the cycle we can infinitely reduce the distance to certain vertices. Due to the above reasons, we are only interested in paths without cycles, which can only contain upto $|V|-1$ edges.
One last thing to note about Bellman-Ford algorithm is that it can be used to detect negative cycles. The idea comes from the properties of the algorithm described above. After $|V|-1$ iterations, Bellman-Ford algorithm finds the shortest distances to all vertices that can be achieved with $|V|-1$ edges. If the graph is free of negative cycles, then the distances in $d$ after $|V|-1$ iterations are the actual shortest distances that can possible be achieved. However, if the graph contains a negative cycle, then it would be possible to obtain shorter distance to certain vertices taking longer paths that contains the negative cycle. Therefore, by running $|V|$th iteration of Bellman-Ford algorithm and checking if the distance table is updated, we can check if the graph contains a negative cycle.
Single Source Shortest Distance on DAGs
If the graph does not contain a cycle, then we can find the shortest distance from a single source to all other vertices in linear time.
- Topologically sort the graph
- Initialize the distance to the source vertex as $0$, and the distance to all other vertices as $\infty$
- For vertex $u\in V$ in topological order: Check every edge $(u,v)$ and update distance if $d[v]>d[u]+l(u,v)$
Once we have a topological sort of the graph, we know in which order the edges must be explored to get the shortest distance. Therefore, the DAG shortest distance algorithm only checks each edge once, which gives the overall time complexity of $O(|V|+|E|)$. Note that the algorithm can be applied on graphs with negative edges as long as the graph is acyclic.
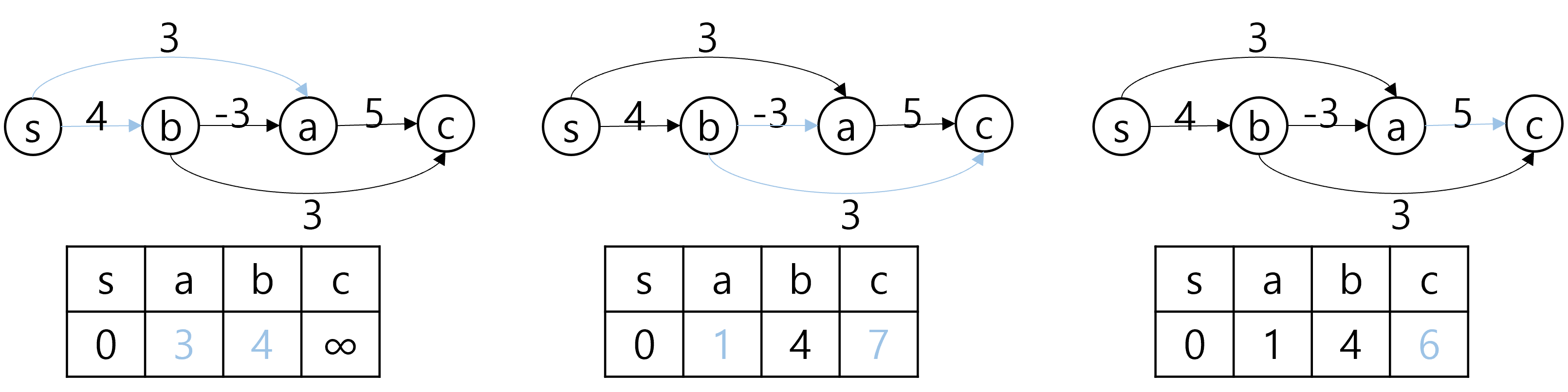
The operation of the algorithm illustrated in the figure seems similar to that of Bellman-Ford algorithm. However, Bellman-Ford algorithm had to iterate over all edges to find distances to update, whereas the DAG algorithm immediately knows which edges to check.
Floyd-Warshall Algorithm
Floyd-Warshall algorithm is another shortest distance algorithm for graphs with negative edges. However, instead of finding the distances from a single source, Floyd-Warshall algorithm finds the shortest distances between any pair of vertices. Floyd-Warshall algorithm recursively fills out a 3D array which would eventually hold the shortest distances. Suppose we labeled all vertices arbitrarily with integers $1,2,…,|V|$. Let $FW(i,j,k)$ denote the shortest distance from vertex $i$ to $j$ that can be achieved using only the intermediate vertices(excluding the source $i$ and the destination $j$) with labels less than or equal to $k$. As the base case, $FW(i,j,0)$ would equal to the length of the edge $(i,j)$ if the edge exists, and $\infty$ otherwise, since we cannot use any intermediate vertices. For $k>0$, there are two subcases to consider. If it is possible to obtain shorter distance by including the vertex $k$, then $FW(i,j,k)$ would equal to $FW(i,k,k-1)$+$FW(k,j,k-1)$, which is the sum of distances from $i$ to $k$ and from $k$ to $j$ using intermediate vertices upto $k-1$. On the other hand, if we can’t construct a shorter path by including $k$, then $FW(i,j,k)$ would be the same as $FW(i,j,k-1)$. Finally, $FW(i,j,|V|)$ would be the shortest distance between $i$ and $j$.
\[FW(i,j,k)= \begin{cases} l(i,j) &\text{if }k=0 \text{ and }(i,j)\in E\\ \infty &\text{if }n=0 \text{ and }(i,j)\notin E\\ \min(FW(i,j,k-1),FW(i,k,k-1)+FW(k,j,k-1)) &\text{otherwise} \end{cases}\]Filling out the 3D array takes $O(|V|^3)$.
Relevent LeetCode Practice (by Tristan Yang)
- LeetCode 935 — Knight Dialer (Medium)
- Relevance: This problem can be seen as counting paths in an implicit graph (phone keypad digits as nodes, knight moves as edges). The DP solution simulates repeated relaxations like in Bellman-Ford, counting ways to reach each node in a given number of moves.
- ECE 374 Process: Use DP with $k$ phases (for exactly $k$ moves). Let dp[step][digit] be the number of ways to end on digit after step moves. Initialize dp[0][start] = 1. Then for each move from 1 to $k$, update: for each digit $d$, for each neighbor $n$ of $d$, add ways from $d$ to dp[step][n]. This is akin to performing $k$ rounds of edge relaxations (or BFS layers, since unweighted moves).
- Resource: LeetCode discuss section for Knight Dialer (various DP approaches).
- Takeaway: Layered DP over a fixed number of steps is equivalent to repeatedly relaxing edges (as in Bellman-Ford) for $k$ iterations, or performing BFS in an unweighted graph for $k$ layers.
- LeetCode 127 — Word Ladder (Hard)
- Relevance: Classic BFS for the shortest path in an unweighted, implicit graph (words as nodes, edges between words that differ by one letter). It’s the foundational unweighted shortest path example, just like the lecture’s BFS shortest path.
- ECE 374 Process: Perform BFS starting from the begin word, where neighbors are generated by changing one letter at a time to any other letter if the result is in the word list. This finds the minimum transformation length. (If the problem asks for the sequences, that’s Word Ladder II, which is more complex.)
- Resource: NeetCode video on Word Ladder.
- Takeaway: BFS finds shortest paths in unweighted graphs. This holds even when the graph is not explicitly given (here neighbors are generated on the fly by altering letters).
Supplemental Problems
-
LeetCode 1514 — Path with Maximum Probability
A variation of shortest path where edges have success probabilities instead of distances. Use a Dijkstra-like algorithm (but maximize product of probabilities, or equivalently maximize sum of log probabilities) to find the most probable path. -
LeetCode 2045 — Second Minimum Time to Reach Destination
Find not just the shortest path but the second-shortest path in a graph with certain time constraints. Often solved with a modified Dijkstra or BFS that keeps track of two best distances to each node. -
LeetCode 1970 — Last Day Where You Can Still Cross
A grid connectivity problem solved by binary searching the day and using BFS/Union-Find to check if a path exists when we treat all lands up to that day as open. Combines binary search with graph connectivity check (BFS or DSU). -
LeetCode 2492 — Minimum Score of a Path Between Two Cities
An undirected graph problem where the “score” of a path is the maximum edge weight on that path, and we want the minimum such value over all paths between 1 and n. This can be solved by computing the MST (which minimizes the maximum edge for any two connected nodes) or via BFS/DFS by always taking the smallest-possible heavy edge. -
LeetCode 1489 — Find Critical and Pseudo-Critical Edges in MST
An MST-based problem: determine which edges are critical (their removal increases the MST cost) and which are pseudo-critical (they can appear in some MST). Solved by finding the MST and then checking each edge by recomputing MST with/without it, or using Union-Find with sorted edges. Included here to contrast MST structures vs. shortest path structures.
Additional Resources
- Textbooks
- Erickson, Jeff. Algorithms
- Skiena, Steven. The Algorithms Design Manual
- Chapter 8.3 - Shortest Path
- Sedgewick, Robert and Wayne, Kevin. Algorithms (Forth Edition)
- Chapter 4.4 - Shortest Paths
- Cormen, Thomas, et al. Algorithms (Forth Edition)
- Chapter 22 - Single Source Shortest Path
- Chapter 23 - All-Pairs Shortest Paths
- Sariel’s Lecture 18
